
Delivering autonomy in days instead of months via software
.png)
Share article
At Tera, we believe the future of autonomy is software that works out-of-the-box across different vehicles and manufacturers. A key central part of that is the navigation stack, which is only as valuable as how fast it can get onto a real platform and start self-navigating. In our previous post, we showed how Tera's transformer-based visual navigation holds meter-accurate position even just navigating over dirt and sand. But state-of-the-art accuracy doesn't matter if standing it up on a new airframe takes a quarter of a year.
So we treated fast integration itself as core feature. The result: we recently took a fielded leading OEM platform from boxed hardware to a validated, operational-ready system in under 40 engineer-hours — roughly one working week, with most of that time spent flying rather than configuring. For a capability that traditionally takes 3-6 months to integrate, that is a step change.
The result
Across one deployment cycle on an OEM fixed-wing platform:
- Under 40 engineer-hours end-to-end, from unboxing to operational-ready
- A half day on the bench for automated system checks and camera calibration
- One platform calibration flight (5–7 minutes) — done once per platform, not once per mission
- 4–6 validation flights over 2–3 days, 25–50 km of cumulative flown distance
- Over 90% less integration effort than a conservative 3-month baseline — a 10–12x faster time-to-value
All of it run from a single bundled software image, on the same class of edge compute our OEM partners already fly.
Why integration usually takes months
For most camera-based autonomy systems, the hard part isn't the first flight — it's every step before it. A traditional integration runs three to six months, and most of that time disappears into the same three places:
- Per-airframe perception tuning. The perception stack gets hand-tuned to each new platform's dynamics, sensors, and mounting, then re-tuned every time something changes.
- Rebuilding the software environment on target. Dependencies, drivers, and runtime versions get reconstructed on the customer's compute, which is where days of environment debugging go to die.
- Re-flying after every change. Each configuration tweak means another field day, so the loop between "change something" and "see if it worked" is measured in days, not minutes.
The pattern is the same everywhere: integration is treated as bespoke engineering. We treated it as a repeatable software process instead.
The deployment, end-to-end
The entire process fits into 4-5 days.
Bench (half day). We start on the bench with automated utility scripts that check the platform against our requirements and run it end to end against known test data — a full exercise of every subsystem before anything leaves the table. We close with a quick camera calibration (~10 minutes) to recover focal length and radial distortion.
Day 1 — platform checks and baseline. We re-run the bench checks on the assembled airframe and confirm the four numbers that matter most before takeoff: sustained camera frame rate (target 20 FPS), end-to-end capture latency (target under 50 ms), companion-computer power draw under load, and GPU/CPU temperatures held below the throttling threshold (typically 85°C on the Orin). Each is logged against the bench baseline. Then a single short flight (5–7 minutes) calibrates the platform-specific model parameters. Because those parameters depend on the platform and not the mission, this happens once — the values carry across every subsequent flight.
Days 2–4 — validation flights. Over the next two to three days we fly 4–6 long-distance (>10 km) sorties, typically 20–30 minutes each, for a cumulative 60–100 km. Spreading them across multiple flights per day surfaces the issues that actually show up in the field: companion-computer power draw, thermal throttling, comms contention between Tera and the flight controller, and whether the camera feed and controller metadata are being read cleanly at a healthy rate. We fly across a range of altitudes and patterns — straight transits, orbits, and grid sweeps — to exercise the system under different motion and ground-texture conditions.
By the end of that phase, the platform is calibrated, validated, and ready for operational use.
Three standards that make it repeatable
The speed isn't a heroic sprint — it's the product of three engineering decisions that turn integration into a standard task.
Containerized delivery. Tera ships as a single bundled Docker image that already contains everything it needs to run. The only things that live outside the image on the host are CUDA, TensorRT, and Mavlink-router configured to talk to us. That removes days of dependency and environment debugging — integration collapses to wiring three known pieces to our container.
Platform-based calibration. Model parameters are calibrated once per platform from a single 5–7 minute baseline flight, rather than re-tuned per mission. This turns what is normally an open-ended tuning loop into one repeatable step.
Automated bench validation. Scripted preflight checks catch hardware and configuration faults before flight, so field days are spent validating performance instead of diagnosing setup. Each flight produces clean, comparable data rather than noise from a shifting configuration — which is exactly what makes the loop fast.
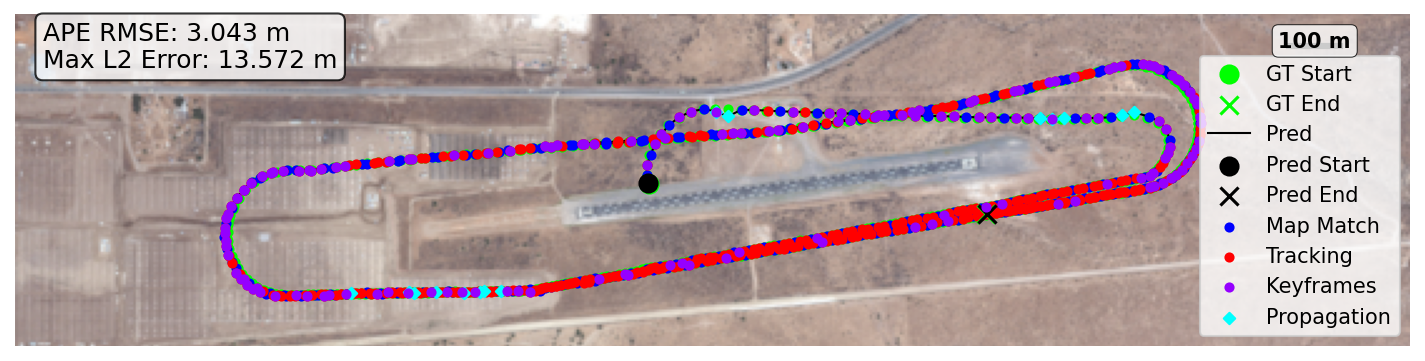
How we know it works
Speed is only meaningful if the bar it clears is real. Our acceptance criterion is an average position RMSE under 30 m for every flight above 150 ft AGL, and we additionally require that the camera holds 20 FPS and capture latency stays under 50 ms for at least 99% of each flight. A flight that misses any of these is logged, the cause is corrected, and the flight is repeated — so the 4–6 figure reflects passing flights, not total attempts.
The platform
This deployment targeted a fixed-wing OEM trainer platform representative of the airframes our partners fly in production:
- Companion compute: NVIDIA Jetson Orin NX 16GB
- Vision input: a global-shutter camera with a narrow field of view, matched to existing sensor payloads
- Software: the full Tera pipeline running on-board in real time, with no cloud dependency and no GPS
Same philosophy as the rest of our stack: no proprietary ground station, no custom flight controller — drop-in software intelligence for platforms operators already fly.
What's next
Productized integration is what lets the navigation layer scale across fleets instead of being rebuilt for each one. As we bring Tera to more airframes, sensors, and domains — ground, air, and maritime — the integration process is built to come along for the ride: same image, same standards, same week-long path from crate to operational.
We're building the navigation layer for the next generation of autonomous platforms.